みなさんこんにちは。
情報システム科の谷内田です。
最近は、雨の日が多くジメジメしがちですが、気分を前向きに張り切って行きましょう!!!。
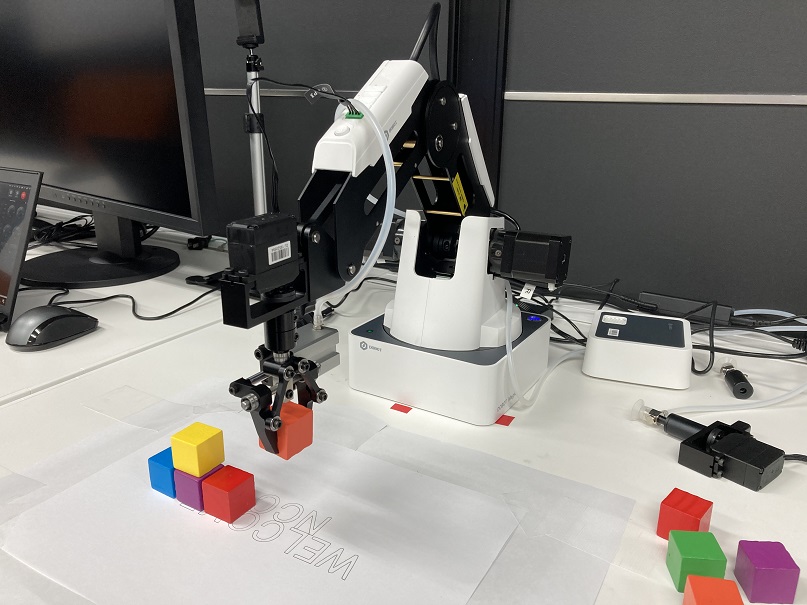
さて、以前よりご紹介しています「DOBOT」ですが、先端パーツを「グリップパーツ」に換えて、動作を作ってみました!。
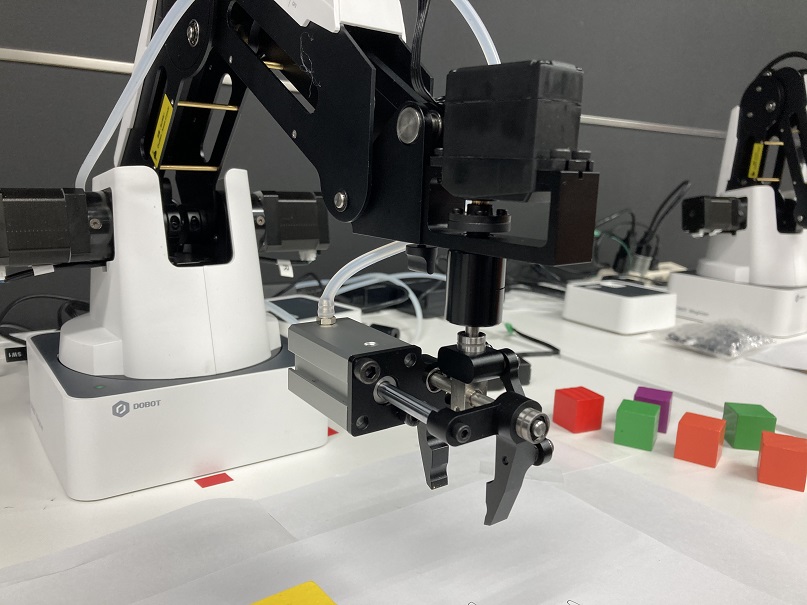
 新しく取り付けた、「グリップパーツ」です。
新しく取り付けた、「グリップパーツ」です。
ブロックを挟んで移動します。
ブロックを挟む動作ですが、少し位置がズレただけで挟めなくなってしまうので、かなり苦労しました・・・。
まだまだ、いろいろことが出来そうなので、これからも動作を作っていきます。お楽しみに!!!。